|
OpenWalker Project
Documentation of the ROS Packages
|
Get Eigen::QuaternionRef to our namespace. More...
#include <quaternion_ref.h>
Public Types | |
| typedef _Derived | Derived |
| typedef Eigen::QuaternionRef< Derived > | Base |
 Public Types inherited from Eigen::QuaternionRef< _Derived > Public Types inherited from Eigen::QuaternionRef< _Derived > | |
| typedef _Derived | Derived |
| typedef Eigen::QuaternionBase< QuaternionRef< _Derived > > | Base |
| typedef Eigen::internal::traits< QuaternionRef >::Coefficients | Coefficients |
Public Member Functions | |
| QuaternionRef (Derived &ref, int startRow=0, int startCol=0) | |
| Default Constructor. More... | |
| Public Member Functions inherited from Eigen::QuaternionRef< _Derived > | |
| QuaternionRef (Derived &ref, int startRow=0, int startCol=0) | |
| Default Constructor. More... | |
| Coefficients & | coeffs () |
| Get quaternion coefficients. More... | |
| const Coefficients & | coeffs () const |
| Get quaternion coefficients. More... | |
| std::string | toString () const |
| Conversion to std::string. | |
Additional Inherited Members | |
| Protected Attributes inherited from Eigen::QuaternionRef< _Derived > | |
| Coefficients | coeffs_ |
| The quaternion coefficients in a Eigen::Block. | |
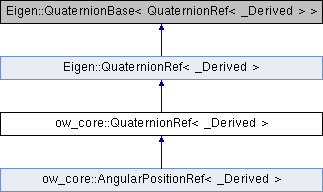
Get Eigen::QuaternionRef to our namespace.
The QuaternionRef class.
References the data of another Eigen type class via Eigen:Block.
We need this special type to get the behavior of Eigen::Quaternion when defining new references.
|
inline |
Default Constructor.
| ref | the reference to storage Eigen object to access the elements of the quaternion via Eigen::Block. |
| startRow | the start index of the row for Eigen::Block. |
| startCol | the start index of the column for Eigen::Block. |
 1.8.11
1.8.11

