|
OpenWalker Project
Documentation of the ROS Packages
|
#include <rotation3.h>
Public Types | |
| typedef _Scalar | Scalar |
| typedef Eigen::Matrix< _Scalar, 3, 3 > | Derived |
| typedef Rotation3Ref< Derived > | Base |
 Public Types inherited from ow_core::Rotation3Ref< Eigen::Matrix< _Scalar, 3, 3 > > Public Types inherited from ow_core::Rotation3Ref< Eigen::Matrix< _Scalar, 3, 3 > > | |
| typedef Eigen::Matrix< _Scalar, 3, 3 > | Derived |
| typedef MatrixRef< Derived, 3, 3 > | Base |
| Public Types inherited from ow_core::MatrixRef< Eigen::Matrix< _Scalar, 3, 3 >, 3, 3 > | |
| enum | |
| typedef Eigen::Matrix< _Scalar, 3, 3 > | Derived |
| typedef Eigen::Block< Derived, Rows, Cols > | Base |
Public Member Functions | |
| Rotation3 () | |
| Default Constructor. | |
| template<typename OtherDerived > | |
| Rotation3 (const Eigen::EigenBase< OtherDerived > &other) | |
| Copy constructor. More... | |
| template<typename OtherDerived > | |
| Rotation3 (const Eigen::RotationBase< OtherDerived, 3 > &other) | |
| Copy constructor. More... | |
| Public Member Functions inherited from ow_core::Rotation3Ref< Eigen::Matrix< _Scalar, 3, 3 > > | |
| Rotation3Ref (Derived &ref, int startRow=0, int startCol=0) | |
| Default Constructor. More... | |
| Rotation3Ref & | operator= (const Eigen::RotationBase< OtherDerived, 3 > &r) |
| Assignment of Eigen::RotationBase. | |
| void | operator= (const tf::Quaternion &q) |
| Assignment of tf::Quaternion. | |
| void | operator= (const geometry_msgs::Quaternion &q) |
| Assignment of geometry_msgs::Quaternion. | |
| void | operator= (const tf::Matrix3x3 &R) |
| Assignment of tf::Matrix3x3. | |
| operator tf::Quaternion () const | |
| Conversion to tf::Quaternion. | |
| operator geometry_msgs::Quaternion () const | |
| Conversion to geometry_msgs::Quaternion. | |
| operator tf::Matrix3x3 () const | |
| Conversion to tf::Matrix3x3. | |
| tf::Quaternion | toQuaternionTF () |
| Conversion to tf::Quaternion. | |
| geometry_msgs::Quaternion | toQuaternionMsg () |
| Conversion to geometry_msgs::Quaternion. | |
| tf::Matrix3x3 | toMatrixTF () |
| Conversion to tf::Matrix3x3. | |
| Public Member Functions inherited from ow_core::MatrixRef< Eigen::Matrix< _Scalar, 3, 3 >, 3, 3 > | |
| MatrixRef (Derived &ref, int startRow=0, int startCol=0) | |
| Default Constructor. More... | |
| std::string | toString () const |
| Conversion to std::string. More... | |
Protected Attributes | |
| Derived | data_ |
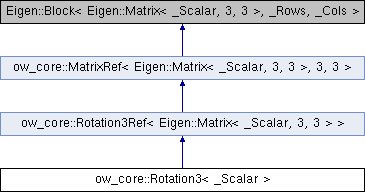
The Rotation3 class.
The Rotation3 is of type Eigen::Matrix3 and is represented by the math symbol  .
.
|
inline |
Copy constructor.
This copy constructor not only works with Eigen matrices but also with their expressions.
|
inline |
Copy constructor.
This copy constructor works with Eigen Rotation representations.
 1.8.11
1.8.11

